BionicFlyingFox
Die Entwickler aus dem Festo Bionic Learning Network haben für den BionicFlyingFox den Flughund unter die Lupe genommen um sein spezielles Flugverhalten technisch umzusetzen. Im Zusammenspiel von einem externen Motion-Tracking-System und einer integrierten On-Board-Elektronik kann das ultraleichte Flugobjekt sich dabei teilautonom in einem abgesteckten Luftraum bewegen.
Natürliches Vorbild für die agile Kinematik
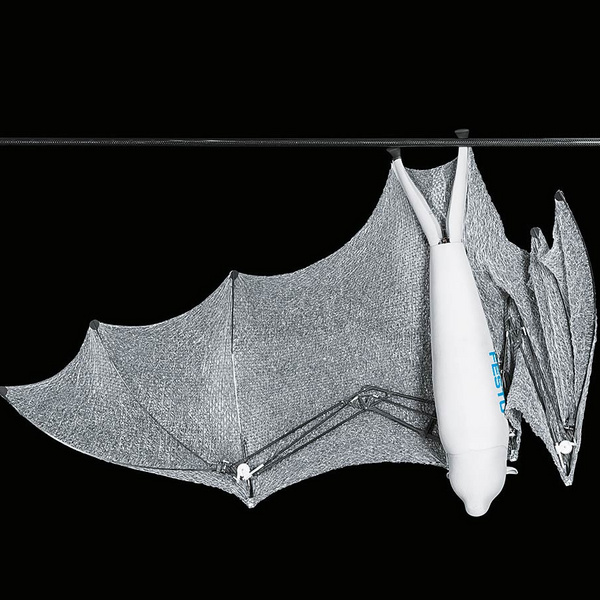
Bei einer Körperlänge von 87 cm und einer Spannweite von 228 cm wirkt der künstliche Flughund nur 580 Gramm. Die Flügelkinematik des BiconicFlyingFox ist wie beim natürlichen Flughund ebenfalls Arm- und Handschwinge gegliedert und mit einer elastischen Haut bespannt, die sich von den Flügeln bis zu den Füßen fortsetzt. Durch die vergleichsweise große Flügelfläche ist die Flächenbelastung sehr gering. Wie bei seinem biologischen Vorbild, liegen alle Gelenkpunkte auf einer Ebene, sodass der BionicFlyingFox seine Flügel einzeln ansteuern und zusammenfalten kann.
Flugmembran speziell entwickelt
Die Flughaut des Modells ist ultraleicht, hauchdünn und gleichzeitig robust. Sie besteht aus zwei luftdichten Folien und einem Elastan-Gestrick, die an ca. 45.000 Punkten miteinander verschweißt sind. Durch ihre Elastizität bleibt sie auch beim Einziehen der Schwingen nahezu faltenfrei. Die Wabenstrucktur des Gestricks verhindert, dass kleine Risse in der Flughaut sich weiter vergrößern und der BionicFlyingFox auch bei leichten Beschädigungen des Gewebes weiterfliegen kann.
Teilautonomes Fliegen in abgestecktem Raum
Der BionicFlyingFox kommuniziert mit einem sogenannten Motion-Tracking-System, um sich in einem definierten Luftraum teilautonom zu bewegen. Die Installation erfasst permanent seine Position. Gleichzeitig plant das System die Flugbahnen und liefert die dazu nötigen Steuerbefehle. Der Start und die Landung werden manuell vom Mensch ausgeführt, während im Flug ein Autopilot übernimmt.
Exakte Lokalisierung durch bewegliches Kamerasystem
Wichtiger Bestandteil des Motion-Tracking-Systems sind zwei Infrarotkameras, die auf einer Schwenk-Neige-Einheit sitzen. Sie lassen sich so drehen und kippen, dass sie den gesamten Flug des Flughundes vom Boden aus verfolgen können. Die Kameras erkennen den BionicFlyingFox dabei anhand von vier aktiven Infrarotmarkern, die an den Beinen und den Flügelspitzen angebracht sind.
Maschinelles Erlernen der idealen Flugbahn
Ein zentraler Leitrechner empfängt die Bilder der Kameras, wertet die Daten aus und koordiniert den Flug, wie ein Fluglotse von außen. Dazu liegen auf dem Rechner vorprogrammierte Pfade, die dem BionicFlyingFox bei seinen Manövern die Flugbahn vorgeben. Die nötigen Flügelbewegungen, um die Sollbahnen optimal umzusetzen, berechnet der künstliche Flughund mit Hilfe seiner On-Board-Elektronik und komplexer Verhaltensmuster selbst. Die dafür notwendigen Regelalgorithmen erhält der Flughund vom Leitrechner, wo sie maschinell erlernt und permanent verbessert werden. Der BionocFlyingFox kann sein Verhalten dadurch während der Flüge optimieren und so die vorgegebenen Bahnen von Runde zu Runde präziser nachfliegen. Die Steuerung erfolgt dabei über die Bewegung der Beine und der damit veränderbaren Flügelfläche.